La nuova corsa alla Luna è alimentata da ambizioni sempre più alte, con le principali potenze spaziali che si dicono tutte intenzionate a costruire una propria base sulla superficie del satellite terrestre. Tra queste non poteva mancare la Cina, la quale ha appena svelato i dettagli del robot umanoide che sarà incaricato di contribuire alla realizzazione della stazione scientifica che Pechino punta a edificare entro il 2035.
A rivelarlo è uno studio pubblicato sul Journal of Deep Space Exploration dal Beijing Institute of Spacecraft System Engineering, intitolato Attrezzature chiave per la costruzione e il funzionamento della Stazione di Ricerca Lunare. Il documento, come appare evidente sin dalle prime pagine, non è un manifesto programmatico, ma una rapida rassegna tecnica delle tecnologie considerate indispensabili per consolidare un avamposto sul suolo lunare. Gli autori descrivono un ecosistema di dispositivi progettati per operare in modo sinergico e affrontare le criticità previste nelle fasi di costruzione e gestione della base: dalla logistica alla manutenzione, dall’approvvigionamento energetico all’utilizzo in situ delle risorse. L’elenco parte comprensibilmente da una piattaforma di atterraggio che, dotata di sei gambe, è concepita per massimizzare la stabilità durante le fasi di touchdown e trasporto dei carichi ed è pertanto destinata a diventare l’infrastruttura cardine per la movimentazione dei moduli e delle attrezzature.
Altrettanto cruciale è il tema della trasmissione energetica tra le diverse strutture della futura base. Nelle fasi iniziali, la Cina non sembra intenzionata a realizzare una rete di cablaggi sulla superficie lunare; allo stesso tempo, installare centrali solari direttamente accanto alle attrezzature da alimentare risulta complesso. Il motivo è semplice: Pechino punta a insediarsi nelle regioni permanentemente in ombra del polo sud – le aree più promettenti per la presenza di ghiaccio – dove la luce solare non arriva mai. La soluzione proposta dagli ingegneri è semplice: “apparecchiature ottiche per focalizzare la luce solare”, ovvero grandi specchi installati sul bordo delle zone illuminate, capaci di intercettare i raggi del Sole e rifletterli verso gli strumenti scientifici e i moduli operativi situati nell’oscurità.
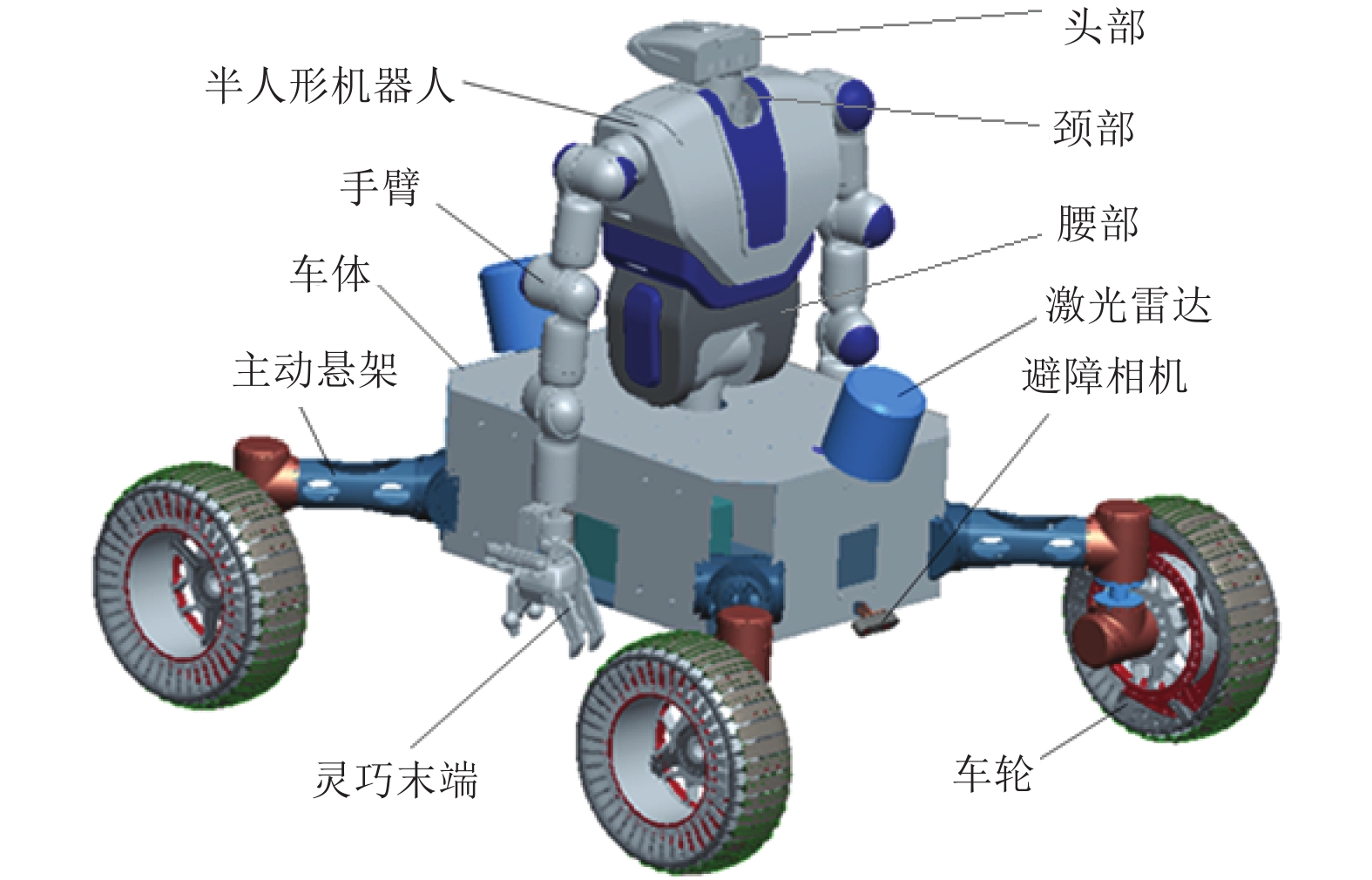
A catalizzare l’attenzione sono però i robot operativi, macchinari progettati con una configurazione semi‑umanoide, busti antropomorfi montati su un sistema di locomozione su ruote. La scelta di evitare le gambe è facilmente comprensibile: garantisce maggiore stabilità, riduce la complessità meccanica e permette di sfruttare una matrice di movimento già ampiamente collaudata da decenni di missioni lunari e marziane. Molto più eclettica è invece la parte superiore del robot, la quale è teoricamente concepita per offrire la massima versatilità d’azione. Questi droidi dovranno infatti occuparsi utopisticamente di una gamma di compiti estremamente eterogenea: attività edilizie, manutenzione delle attrezzature, movimentazione dei materiali, campionamento scientifico e operazioni di ricerca. Un ventaglio di mansioni che richiede flessibilità, precisione e una buona dose di destrezza.
I droidi possono muovere la testa per ampliare il campo visivo e ruotare il busto fino a 180°, oltre a flettersi di circa 90° per raggiungere oggetti posati al suolo – o il suolo stesso. Per evitare che questa ampia mobilità comprometta la stabilità del sistema, batterie, processori e altri componenti pesanti sono alloggiati all’interno del corpo del veicolo, così da abbassare sensibilmente il baricentro dell’intera macchina. Per orientarsi e navigare il terreno irregolare della superficie lunare, i ricercatori prevedono invece di affidarsi a una combinazione di telecamere e sensori LiDAR, una soluzione già consolidata nell’esplorazione planetaria e particolarmente adatta a gestire ostacoli, pendenze e scarsa visibilità.